

étudiants
partenaires
Qu'est-ce qu'un PGE ?
Équipe pédagogique
Contexte et motivation
Afin d’étudier les mécanismes de formation de l’univers et d’apparition de la vie, les scientifiques s’intéressent aux corps célestes tels que les astéroïdes et les comètes. Depuis les années 2000, sept missions d’exploration de corps célestes ont eu lieu (ou vont débuter), elles ont été réalisées par la NASA (NEAR, Deep Impact, Stardust, Dawn), la JAXA (Hayabusa 1 & 2) mais aussi l’ESA (Rosetta).
Ces différentes missions ont en commun d’avoir exploité des images prises par des caméras embarquées sur les véhicules pour pouvoir se localiser par rapport aux objets célestes et pouvoir se maintenir dans leur voisinage ou atterrir à leur surface.
Parmi les différentes missions d’exploration, seules celles de la JAXA (Hayabusa) exploitent les images à bord du véhicule pour la phase de rapprochement terminal mais elles nécessitent pour cela le déploiement d’un marqueur artificiel à la surface de l’astéroïde.
Le projet ISAL, proposé par le CNES, a pour objectif de développer une solution qui permettra à des sondes spatiales de se poser de façon autonome sur des corps célestes en se servant non pas de marqueurs artificiels mais de marqueurs naturels.
Le Projet
Le projet ISAL est le Projet de Grande Envergure 2017 des étudiants de dernière année de SRI (Systèmes Robotiques et Interactifs).
Proposé par le CNES, ce projet s’inscrit dans la préparation de la future génération de sondes qui ne s’aideront que de l’environnement naturel pour se localiser et gérer leur atterrissage. Cette solution offre davantage de perspectives mais est aussi beaucoup plus risquée et compliquée à mettre en œuvre.
Comme pour les précédentes missions spatiales réalisées, la méthode d’atterrissage se sert de ce que l’on appelle la commande basée vision : pour atterrir, la sonde doit exploiter des images prises par une caméra embarquée. La principale différence est qu’une grande partie du traitement des images sera gérée non plus au sol mais à bord du lander.

A l’issu de ce projet, le but est de produire deux types de simulateurs :
- Un simulateur numérique : il permettra de valider les algorithmes d’analyse d’image et de gestion de la navigation et de l’atterrissage qui auront été développés dans environnement entièrement simulé, les images exploitées seront issues d’un logiciel de simulation d’images 3D ;
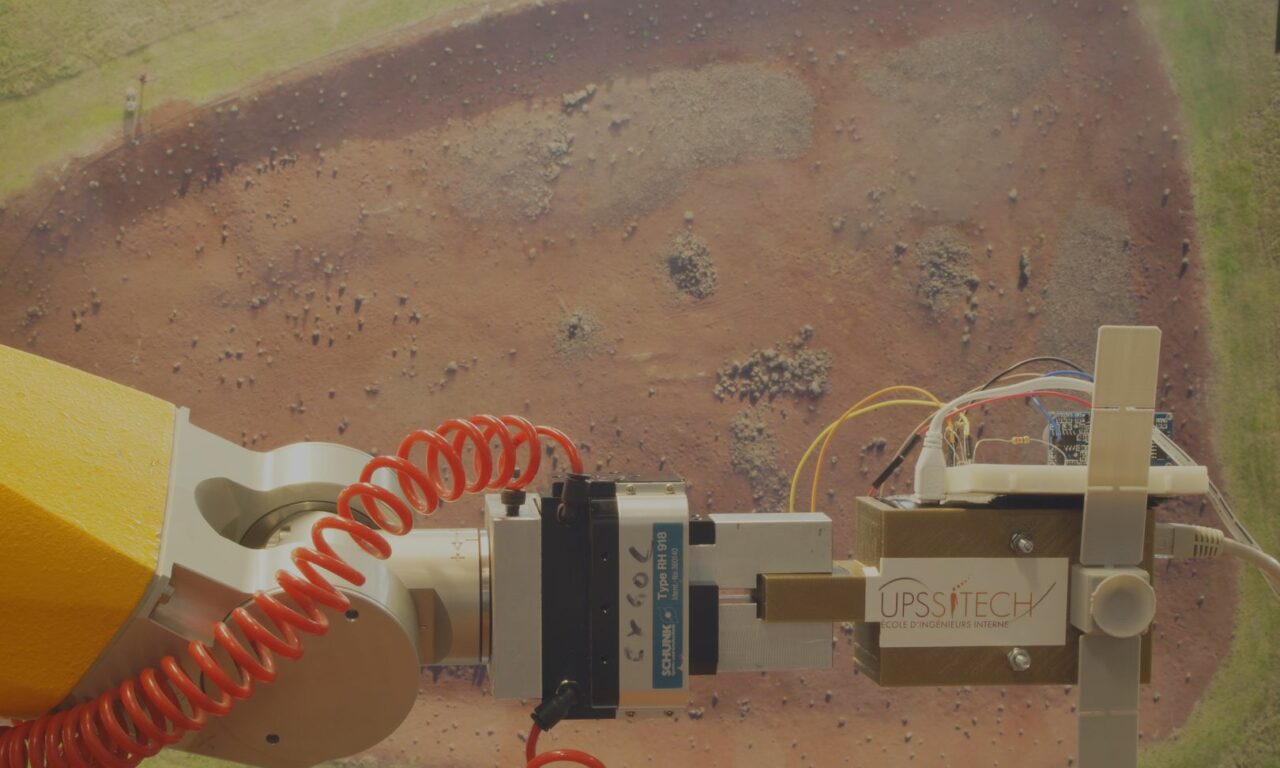
- Un simulateur physique : il permettra lui aussi de valider les algorithmes, mais cette fois-ci dans un environnement expérimental se rapprochant le plus possible des conditions réelles auxquelles la sonde pourra être confrontée. La simulation sera réalisée à l’aide d’un drone ainsi que d’un bras robotique.
Le projet sera présenté au cours de la réunion publique le 3 mars, à 10 heures, à l’Université Paul Sabatier (Amphithéâtre Concorde). Il s’agira de rappeler le contexte et les motivations du projet, de décrire le cahier des charges et présenter le système développé en collaboration avec le CNES.
Entreprise partenaire
Le Centre National d’Etudes Spatiales ou CNES (https://cnes.fr/), créé en 1961, est l’établissement chargé de développer et de proposer le programme spatial au gouvernement.
Le CNES a 5 domaines d’intervention :
- Ariane ;
- Les sciences ;
- L’observation ;
- Les télécommunications ;
- La défense.
Le projet ISAL appartient au domaine des sciences consacré à l’exploration de l’espace et à la recherche de réponses aux questions fondamentales de l’humanité sur l’origine du système solaire, des galaxies, de la vie.
Formation partenaire
L’UPSSITECH est une école interne gérant les formations habilitées à délivrer le titre d’ingénieur de l’Université Paul Sabatier. Cette école est un département à autonomie renforcée de la Faculté des Sciences et d’Ingénierie.
La spécialité « Systèmes Robotiques et Interactifs » (SRI) a vocation à former et certifier des ingénieurs de haut niveau scientifique et technique, avec une double compétence informatique et automatique, capables de concevoir, développer et intégrer des systèmes complexes utilisant les technologies de la robotique et de l’interaction. Les compétences généralistes et spécifiques acquises autour de ces systèmes seront intégrées, durant le cursus, sur divers systèmes complexes virtuels ou physiques. L’interaction est centrale car ces systèmes robotisés au sens large (systèmes de transports, spatiaux, de production, etc.) interagissent avec des environnements variables et évolutifs (humain, systèmes mobiles, ambiants). Les compétences acquises par les diplômés leur permettent d’intégrer tous les secteurs traditionnels de l’ingénierie bien au-delà de l’industrie de la robotique et de l’interaction.
Membres équipe pédagogique - PGE 2017
Agnan de Bonneval
Cyrille Briand
Patrick Danes
Isabelle Ferrane
Frédéric Lerasle
Julien Pinquier
Michel Taïx
Philippe Truillet
Julien Vaderstraten
Promotion




Liens externes
